Edit on GitHub
Stepper Motors
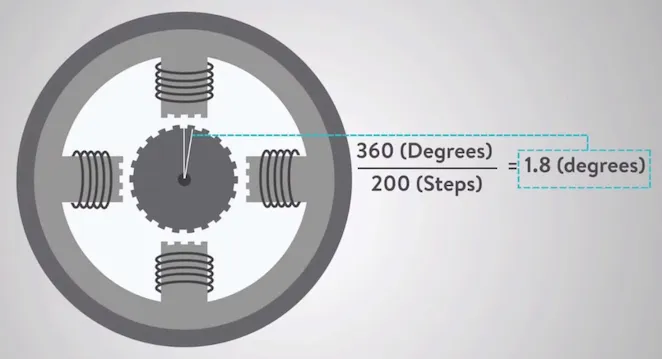
Steps per revolution
Number of steps the motor takes to complete one revolution
- 200 for 1.8°
- 400 for 0.9°
Microsteps
Number of microsteps your driver is configured to use per full step.
mm per revolution
For a leadscrew or ballscrew system
For a belt-driven system
Sample
Pulley: 2GT-20T
mm_per_revolution = 2mm × 20 = 40mm
Steps per mm
The formula to calculate steps_per_mm is:
Samples
TB6600 Microstepping Settings
The TB6600 stepper driver supports various microstepping settings controlled by three DIP switches (SW1, SW2, and SW3). Below is a table showing the switch configurations and the corresponding microstepping modes:
| Microstep Setting | SW1 | SW2 | SW3 | Steps per Revolution (for a 200-step motor) |
|---|---|---|---|---|
| Full Step (1) | OFF | OFF | OFF | 200 |
| Half Step (1/2) | ON | OFF | OFF | 400 |
| Quarter Step (1/4) | OFF | ON | OFF | 800 |
| Eighth Step (1/8) | ON | ON | OFF | 1600 |
| Sixteenth Step (1/16) | OFF | OFF | ON | 3200 |
| Thirty-second Step (1/32) | ON | OFF | ON | 6400 |